KnuckleArmTruck
Jelikož je Merkur celkem váhově těžká stavebnice díky kovovým dílům, je často obtížné zpřevodovat slabé motory tak, aby vybranou částí pohnuly. Po dlouhém přemlouvání sama sebe, jsem si nakonec koupil dvě stavebnice Lego Technic, abych měl malou základnu pro tvoření.
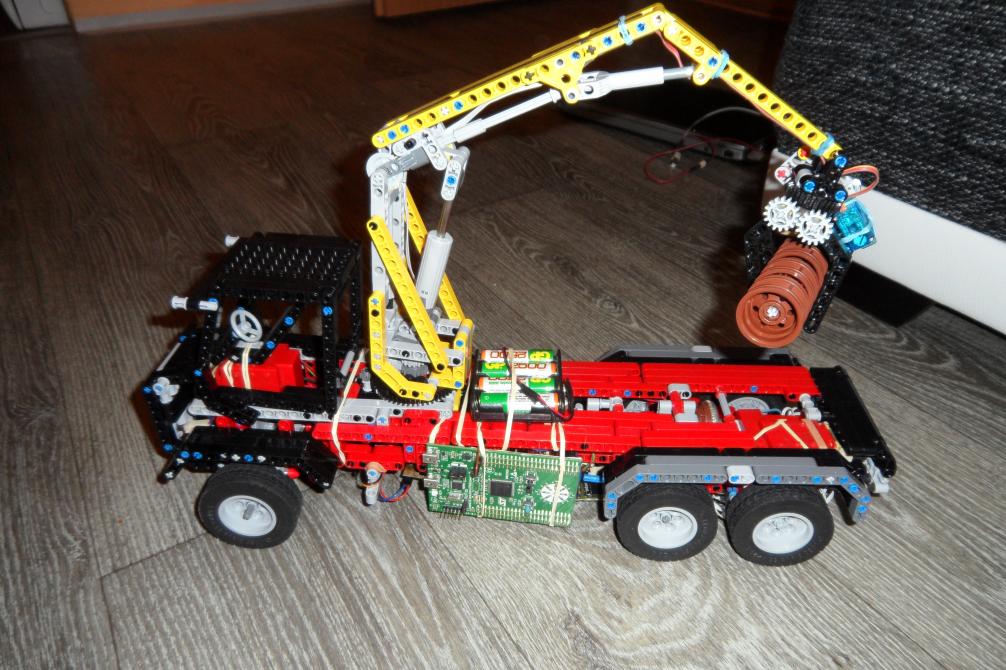
Prvním výrobkem, který jsem se rozhodl vyrobit, se stalo nákladní auto s ramenem. Zpětně jsem s výsledkem velmi spokojen. Nákladní auto je řízeno procesorem ARM Cortex M4 od výrobce STM a instruováno pomocí dálkového ovládání vlastní výroby. Veškeré použité periferie jsou vlastní výroby (až na modul XBee).
Konstrukci jsem se rozhodl začít od mechanismu ramene, který je na tomto autě stěžejní a nese s sebou nejvíce práce. Rameno sestává ze dvou pístů, které rameno ohýbají a drapáku pro uchycení nákladu. Drapák je tvořen servo motorem. Avšak písty jsou poháněny dvěma motory, které je nutné k pístům přivést. Pohonné funkce jsou vedeny prostředkem mechanismu uchycení ramena pomocí dvojice hřídelí, kde jedna z hřídelí je vedena dutinou té druhé.
Poté přišel samotný problém uchycení motorů v konstrukci. Jelikož motory trochu vibrují (obsahují totiž převodní díly Merkur -> Lego vlastní výroby), přidělal jsem je nakonec ke konstrukci pomocí gumiček. Celkem jsou v konstrukci použity 4 motory (písty, pojezd, rotace ramene) a 2 serva (drapák, zatáčení kol).
Na závěr jsem přidal osvětlení pomocí LED diod, které jsou po drobné úpravě pomocí vrtačky, zasunul přímo do otvorů ve stavebnici. Následovalo přidělání všech potřebných periferií a jejich propojování s motory, diodami a samotným procesorem. Tento proces trval snad nejdéle, poněvadž jsem musel vyrobit velké množství propojovacích kabelů.
Co to umí?
Bystrému čtenáři již všechny funkce tohoto výrobku došly, avšak i přesto je v této sekci zopakuji. Auto umí jezdit dopředu a dozadu s volitelnou rychlostí pojezdu. Samozřejmostí je i volba natočení předních kol. Dále je auto vybaveno předními světly, zadními světly, brzdovými světly a dvěma směrovkami.
Hlavní funkce celého výrobku představují manipulaci se samotným ramenem. Celkem má toto rameno 4 stupně volnosti: jde otáčet o 360 stupňům, velký píst zvedá drapák do výšky, malý píst jej pak vzdaluje od auta. Poslední stupeň volnosti představuje koncový drapák, která lze rozevírat. (Fyzicky rameno umožňuje 5 stupňů volnosti: drapák je směrován kolmo dolů pomocí gravitace.)
Kliknutím na název zobrazíte zdrojový kód
Rameno s písty

Hřídele pro pohyb pístů

Diferenciál pro pojezd

Zadní světla
Uchycení ramene a motor pro rotaci

Zatáčení kol pomocí serva

Hrubá konstrukce auta

Přední světla

Kompletní kabina

Zadrátování periferií k procesoru

Finální zapojení periferií k procesoru

Kompletní auto

Kabely použití při konstrukci

Převodovka Tamyia použitá pro pohyb pístů
