Přístavní jeřáb (2011)

Po drobnějších konstrukcích jsem se rozhodl postavit něco většího. Napadl mě přístavní jeřáb a tak jsem se s chutí pustil do práce. Po mechanické stránce se nejednalo o zrovna moc snadnou stavbu kvůli velkým pohyblivým dílům a omezeným výkonům motorů. Ale nakonec se vše podařilo a přístavní jeřáb fungoval dle mých představ.
První kolejnice je fixně uchycena a tvoří celkovou konstrukci. Na ní je položen druhý díl, který je pomocí provázků přetahován z jedné strany na druhou. O přetahování se stará motorek z merkuru, na který jsou přichycena dvě kola, přes které vede provázek napnutý pružinou, aby se co nejvíce zvýšilo tření provázku o kolo. Na každé straně se pak nachází spínač omezující pohyb tohoto dílu - po najetí na okraj je spínač stisknut, což vyvolá zastavení motoru.
Na druhém díle je pak umístěn díl poslední, který sestává z Tamiya převodovky, kde jeden motor opět pohání provázek napnutý na druhém díle, čímž se tento třetí díl pohybuje na kolejnici dílu druhého. Druhý motor slouží k namotávání provázku s háčkem, který je použit pro manipulaci s nákladem. Krajní pozice třetího dílu jsou opět ošetřeny spínači umístěných na díle druhém.
Z třetího dílu dále vede k podlaze senzor, který je použit pro automatickou detekci nákladu. Jeřáb tedy umí sám vyhledat náklad (překážku), pro ten dojet, naložit a dovézt zpět. Vyhledávání nákladu probíhá následovně: v krajní pozici postupně posouvám třetí díl se senzorem, čímž postupně proskenuji prostor. Po nalezení překážky pojezd třetího dílu zastavím a začnu hýbat dílem druhým. Senzor se tedy postupně přibližuje k nákladu. Poté již jen spustí dolů háček, počká, až se náklad přichytí, háček opět namotá, a pak se již nejkratší cestou vrátí do výchozí pozice.
V této realizaci jsem však už musel řešit chyby měření uvedené v jenom z předchozích článků. Senzor neměří přesně a navíc dokáže měřit předměty vzdálené alespoň 12cm. Člověk tedy musí naměřené hodnoty nejen filtrovat, ale i odhadovat pohyb ústrojí, když už senzor nevrací žádné hodnoty, tedy v situacích, kdy vzdálenost senzoru od nákladu je již menší než 12cm.
Celý jeřáb je dále možné ručně ovládat pomocí čtveřice tlačítek umístěných kolem diplaye. Prvním tlačítkem se provádí volba funkce (např. výběr motoru), dalšíma dvěma pak samotné ovládání vybrané funkce (např. motor doleva, motor doprava). A právě samotné ovládání displaye bylo taktéž nemalou výzvou, poněvadž jsem tak činil poprvé. Vše se však nakonec podařilo, jak je vidět v přiloženém, ne moc kvalitním, videu.
Kliknutím na název zobrazíte zdrojový kód
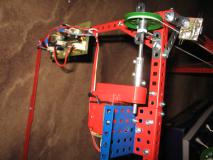
Hlavní konstrukce jeřábu
Spínače vymezující operační prostor

Naviják a pojezd 3. dílu

Procesor a display

Realizace bez senzoru

Mechanika a připravený vodič pro senzor
