Auto s nakladačem (2011)
Dalším krokem v objevování světa robotika pro mě byla serva. Pro demonstraci mě napadlo sestavit robotické rameno. Nakoupil jsem tedy různé velikosti (různé síly) a dal jsem se do práce. Robotické rameno jsem vytvořil nařezáním a sešroubováním dílů z hliníkového profilu ,,U" Vrtáčky a pilníkem jsem vyřezal otvory pro uchycení servo motorů a vedení přívodních kabelů.
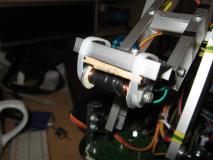
Předměty jsou k ramenu přitahovány domácky vyrobeným elektromagnetem. Ten jsem vyrobil tak, že jsem do vrtačky uchytil šroub a přemotal na něj smaltovaný drát starého elektromotorku. Vše je nutné patřičně přichytit, aby se drátky v budoucnu nepoškodily.
Samotné rameno sestává ze tří servo motorů. O rotaci se stará motor navinující provázek obmotaný kolem podstavy ramene. Na každé straně je dále mžikový spínač, který rameno v krajní poloze stiskne, čímž se rotace ramene zastaví. Druhý motor pak namotává provázek, který zatáčí s přední nápravou. Motory jsou usazeny v převodovce Tamiya, která není tak moc drahá a na domácí hraní víc než poslouží (lze jí sestavit ve 4 různých konfiguracích - různé poměry otáček).
Pojezd je řešen dvojící motorů z merkuru z důvodu vyšší váhy konstrukce. Všechny motory, ale i samotný elektromagnet, jsou spínány klasicky pomocí h-můstku. Serva obsahují vlastní řídící logiku včetně můstků, takže jim stačí přivést napájení a signál (PWM) o daném rozsahu délky pulzu.
Při vyvíjení toho auta jsem se naučil ovládat serva i si vyzkoušel výrobu vlastního elektromagnetu. Při ovládání serv bylo z počátku těžké zajistit jejich vzájemnou kooperaci - např. zajistit aby poslední díl nosící elektromagnet bylo vždy vodorovně s podlahou. Nejprve jsem se pokoušel vše matematicky spočítat, následně jsem doladil drobnosti nedoceňovanou metodou pokusu a omylu. Výsledný zdrojový kód je založen na vlastních knihovnách Motor, IrDekoder, Switch a OvlServa.
Kliknutím na název zobrazíte zdrojový kód
Prototyp robotického ramene

Podomácku vyrobený elektromagnet
Uchycení el. magnetu na rameni

Omezení rotace pomocí spínače

Umístění elektroniky

Pohled na elektroniku zezhora

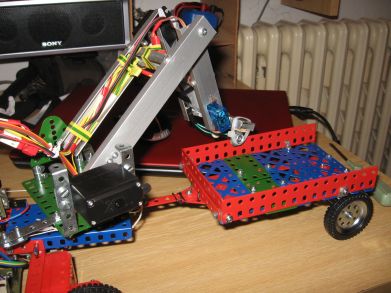
Robotické rameno a valníček

Mechanismus zatáčení kol
