Vysokozdvižný vozík (2012)

Další výzvou z oblasti zemědělských strojů byl vysokozvižný vozík. Jako inspirace mi pusloužila Desta mého strýce. Začal jsem od pro mě nejtěžší části. Tou bylo rotační ústrojí sloužící k vysýpání obsahu palet. O rotaci zpět se stará natažená gumička. Nakonec jsem jako mechanismus zvolil kontinuální servo, na který namotávám provázek, které přes kolo otáčí tyčkou, na které jsou uhyceny ,,vidle" sloužící k manipulaci s nákladem. Kontinuální servo lze vyrobit z klasického serva. Stačí odpojit potenciometr, místo něj připojit dva stejné odpory - čímž se nastolí střední pozice 90°. Dále se musí odstranit zarážka blokující pohyb posledního ozubeného kola v převodovce. To jde udělat pouhým odpájením kousku plastu a začištěním.
Následně jsem se pustil do samostatné kostry vozíku. Připevnil jsem servo a vytvořil mechanismus zatáčení zadních kol. Dále do konstrukce přišla převodovka Tamiya. Jeden vývod je použit na namotávání provázku zvedajícího díl z předchozího kroku, druhý vývod byl pak původně připojen k pohonu předních kol. Následovala montáž serva a připojení na kolejnice pro vidle. Toto servo slouží k náklonu dopředu a dozadu.
Ještěrku jsem doplnil o elektroniku, přední světla, zadní světla a kabinu s majáčkem, abych se přiblížil realitě i z vizuální stránky. Po naprogramování a následném testování jsem však zjistil, že pohybové vlastnosti vozíku jsou dosti špatné. Musel jsem tedy vozík asi z 75% rozebrat, rozebrat i nosnou konstrukci a zaintegrovat do ní nový motorek, který je přímo připojen na přední kola. Poté již stačilo znovu připevnit všechna serva, elektroniku a kabinu.
Obecně je postup vytváření jakýchkoli výrobků často doprovázen neustálým přestavováním až do finální podoby. S novým motorem již byly pojezdové vlastnosti dostatečné, stačilo již tedy pouze doladit programování a vycentrovat jednotlivá serva a vymezit jejich pohyb.
S vysokozdvižným vozíkem jsem si hrál minimálně dva dny. Umí jezdit, zatáčet koly, rozsvěcet světla, blikat majáčkem. Vidle používané pro manipulaci s nákladem umí zvedat, naklápět i rotovat. Demonstraci můžete vidět v přiloženém videu, kde přijedu k paletě, naložím jí, dovezu k valníku a do něj jí vyklopím. Celé ústrojí je ovládáno univerzálním dálkovým ovládáním vlastní výroby popsaném v jednom z předchozích článků.
Závěrem bych jen dodal, jak je důležité vymezovat minimální a maximální pozici serva. Při pevných spojeních s konstrukcí (např. zatáčení zadních kol) a překročení maximálního možného úhlu daného mechanickou konstrukcí se servo stále snaží nastavit požadovanou pozici, což je však mechanicky nemožné. Při použití obyčejných serv s plastovými převody je pak výsledkem zničení ozubených koleček v převodovce serva. Stane-li se to jednou, dvakrát, dají se zuby ještě narovnat a vybrousit. Poté však se již vylámájí a je potřeba výměny koleček převodovky serva.
Kliknutím na název zobrazíte zdrojový kód
Díl pro rotaci nákladu

Servo pro zatáčení kol
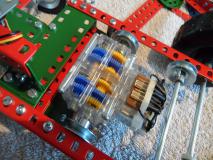
Uchycení převodovky

Servo na náklon vidlí

Realitace I

Nový motor na pojezd

Nové uchycení serva

Elektronika

Přední světla, nový pohon

Finální demonstrace fukčnosti
