Auto (2011)
Auto byl první projekt, který by se dal považovat za ,,opravdivého", leč prostého, robota. Samozřejmě se jedná o dálkově ovládaný stroj, který je oproti předchozímu traktoru obohacen robotickou logikou ve smyslu vnímání okolního prostoru.
V zadní části je uchycen nárazník pomocí dvou mžikových spínačů. Ty tedy detekují náraz do překážky při couvání. Auto se v takovém případě zastaví, aby se zbytečně neničilo. V přední části se nachází sofistikovanější IR čidlo, které měří vzdálenost překážky umístněného ve směru čidla. Tímto způsobem je možné detekovat přibližující se předměty. Pokud čidlo začne nějaký předmět detekovat, auto začne pípat. Čím blíže se auto předmětu přibližujeme, tím častější je i pípání. Po překročení bezpečné vzdálenosti auta od překážky, se auto samo zastaví a přestane pípat. Samozřejmě nechybí ani již klasické osvětlení automobilu.
Auto je poháněno dvěma motory - jeden na pojezd, druhý na zatáčení. Zatáčení je provedeno tímtéž mechanizmem, jako tomu bylo u traktoru. Pohon je zde zpřevodován na rychlejší pojezd - váha tohoto autíčka už není tak vysoká, proto může dosáhnout vyšší a závratnější rychlosti.
To, čím byl tento výrobek pro mě zajímavým, bylo naučit se zpracovávat analogový signál čidla - použil jsem GP2Y0A21 od Sharpu. Jedná se sice o levné IR čidlo, ale na běžné hraní bohatě stačí. Od toho se pak odvíjí samozřejmě i kvalita měření - chyby v měření a pod. Ale tu jsem v tomto projektu neřešil - o tom později u Jeřábu, kde jsem všechny tyto zákeřnosti musel odladit. Použity jsou především vlastní knihovny Motor a IrDekoder.
Kliknutím na název zobrazíte zdrojový kód
Umístění čidla pro měření vzálenosti k překážce

Umístění procesoru a zadní nárazník

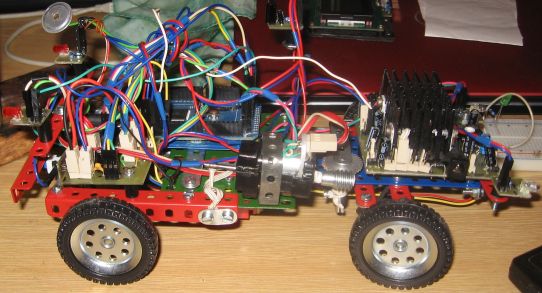
Pohled na hotové autíčko
