Buldozer 2. verze (2012)
Koukal jsem se po internetu na robotické součástky a narazil jsem na relativně levné pásy s kolečky. Na rozdíl od pásu v merkuru, nasedají na ozubená kola a nemusí se proto tolik přepínat, na čemž se v merkuru ztrácelo od motoru nejvíce výkonu. Navíc kola nasedají na hřídel kompatibilní s převodovkou Tamiya. Pásy se skládali z více dílů, člověk si tedy mohl sestavit relativně libovolnou délku pásu. Já jsem samozřejmě sestavil tu nejdelší možnou variantu.
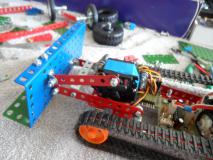
V předchozích konstrukcích jsem se již přiučil, že místa není nikdy nazbyt. Sestavil tedy nejdřív minimalistickou konstrukci s převodovkou a pásy. Poté jsem přidal modul pro ovládání motorů a serv. Následně jsem v patřičných proporcích sestavil radlici a začal přemýšlet, jak jen jí tam připevním a jak do toho zaintegruji servo motory. První, větší servo motor starající se o zvedání radlici, jsem k podvozku pevně přišrouboval. Je to servo s velkým kroutícím momentem a odvádí největší práci. K radlici jsem jej připevnil pomocí krátkého ramene. Tím jsem ,,zpřevodoval" 180° rotaci serva na zvedání radlice o cca 4 cm.
Dalším oříškem bylo připevnění druhého serva starajícího se o náklon radlice. Nakonec jsem jej připevnil k prvnímu servu pomocí elektrikářské izolační pásky, čímž jsem zajistil pevné spojení s podvozkem při minimálním prostorovém využití. Rameno naklápějící radlici jsem přímo připojil na rameno serva. Tím byly zakončeny práce na pohyblivých mechanických částech.
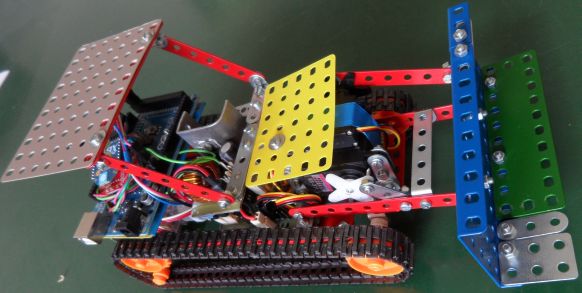
Z elektroniky už zbýval jen regulátor napětí na 5V, kterým je napájen jak procesor, motory, tak serva. Ten jsem umístil nad modul pro řízení motorů. Posledním krokem pak bylo doladění vzhledu výrobku do věrohodnější podoby pásáku. Vyrobil jsem odlehčenou kabinu a korbu - čím lehčí, tím více výkonu zbude na pojezd. Jak to vše dopadlo, včetně jednotlivých mezikroků, můžete vidět níže... Samotné programování již bylo, díky dříve vytvořeným, vlastním knihovním funkcím, relativně snadné.
A co jiného s pásákem, než si jít hrát ven na písek. Užil jsem si spoustu srandy, záběry můžete vidět z přiloženého videoklipu. Jednu věc jsem však při konstrukci podcenil. Tou byly vzpruhy na spodní části pásu. Vypínat pás jen pomocí dvou kol je neefektivní a v praxi téměř nepoužitelné. Konstrukci je tedy lepší doplnit o minimálně 3 vypínací kola - nejjednodušší je asi připevnit kola na rameno, ramena propojil tyčkou a tu napínat k podvozku gumičkou.
Kliknutím na název zobrazíte zdrojový kód
Schéma ovládání

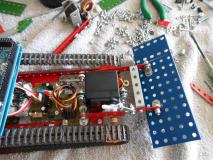
Kostra s motory a pásy

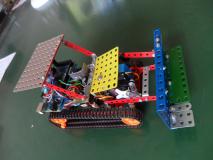
Procesor, jednotky řízení motorů a serv
Servo pro zvedání radlice
Servo pro náklon radlice

Napěťový step-down regulátor