Buldozer (2011)
Pásák byl můj první výtvor na bitevním poli robotiky. Na jeho vytvoření jsem musel vyrobit spoustu základních periferií, napsat několik knihoven. Byl to kýžený úspěch mnohatýdenního usilovného snažení. Z výtvoru jsem měl velikou radost, sic to byl jen ,,obyčejný" pásák. Znamenal pro mě nebývalý úspěch a dobrý úvod a start do problematiky robotiky.
Pásák pro své fungování potřebuje dva motorky řízené pomocí H-můstku, napájecí zdroj 5V, dvě ultrasvítivé diody a nakonec IR-přijímač. Samozřejmostí je deska Arduina a spousta kabeláže. Použity jsou především vlastní knihovny Motor a IrDekoder.
Řízení probíhá pomocí univerzálního dálkového ovladače. Pásák reaguje na jednoduché příkazy - jeď dopředu, dozadu, otáčej se doleva, doprava, zastav. Jako třešnička na dortu slouží příkaz k rozsvícení a zhasnutí světel.
Jako základ jsou použity staré zbytky stavebnice Merkur, kteréžto jsem vyhrabal na půdě jako pozůstatek mého dětství. K pohonu slouží dva motorky - jeden byl součástí Merkuru 8, druhý jsem si dokoupil. Aby byly kompatibilní s konektory H-můstku a daly se jednoduše zapojovat atd., musel jsem motorky rozebrat, vyvést nové kontakty, dále jsem vyvedl i kostru kvůli filtraci a ochraně a vše přidělal na malou destičku, kterou jsem pak zezadu k motorku přilepil.
Kliknutím na název zobrazíte zdrojový kód
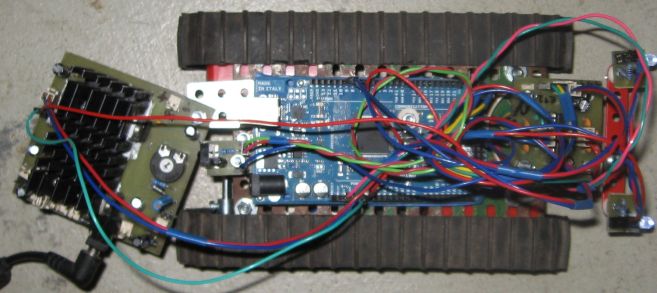
Pohled zezhora

Napájení a světla

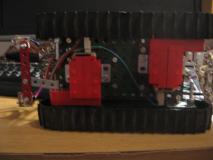
Celkové provedení